- Home
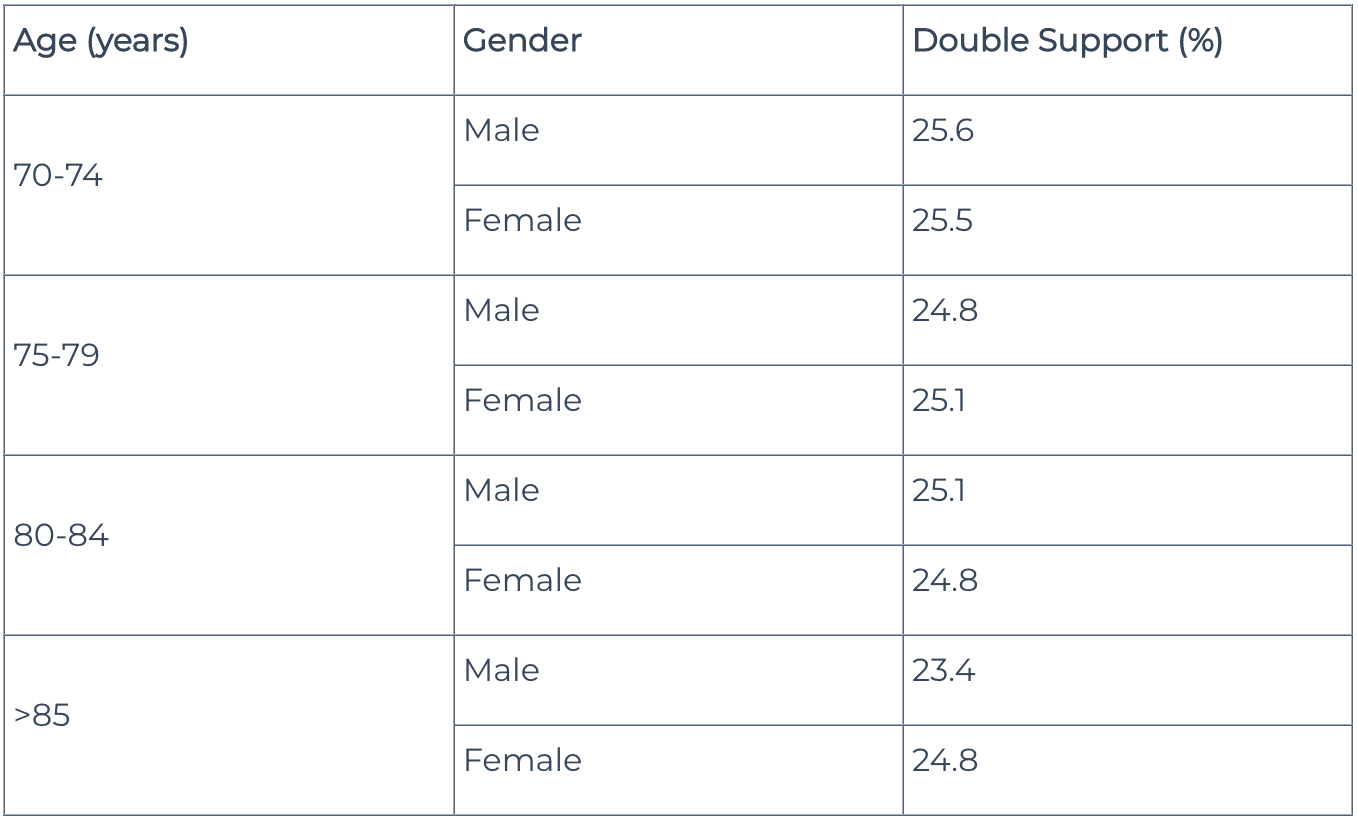
- double support
- Frontiers Gait Optimization Method for Humanoid Robots Based on Parallel Comprehensive Learning Particle Swarm Optimizer Algorithm
Frontiers Gait Optimization Method for Humanoid Robots Based on Parallel Comprehensive Learning Particle Swarm Optimizer Algorithm
4.7 (537) · $ 18.99 · In stock


Development of particle swarm clustered optimization method for
Frontiers Coordinating human-robot collaboration by EEG-based
Frontiers A parallel heterogeneous policy deep reinforcement

gait training - List of Frontiers' open access articles
Frontiers Gait Optimization Method for Humanoid Robots Based on
A Comprehensive Review of Swarm Optimization Algorithms
Frontiers Virtual Point Control for Step-Down Perturbations and
Frontiers Humanoid Robot Cooperative Motion Control Based on

Advancements in Humanoid Robots: A Comprehensive Review and Future
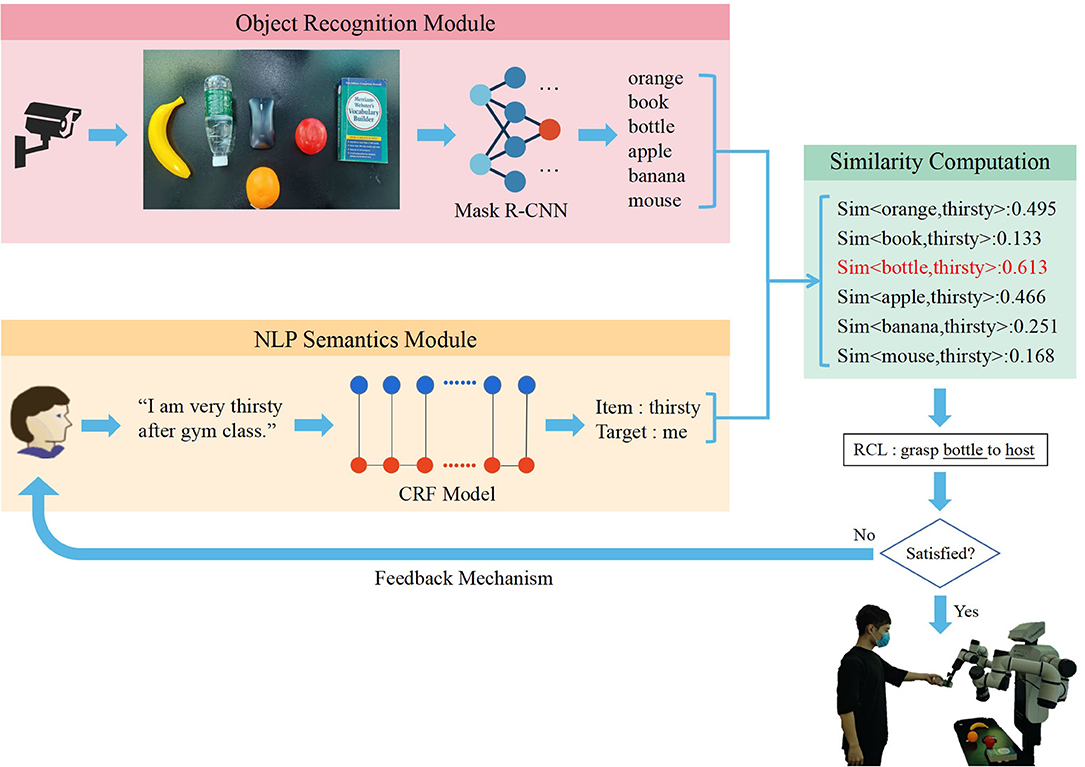
Frontiers Intention Understanding in Human–Robot Interaction

Using bilateral symmetry of the biped robot mechanism for

PDF) Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers A parallel heterogeneous policy deep reinforcement